In response to the various needs, we integrate different types of sensors, including visible light cameras, structured lights, infrared cameras, 3D cameras, LiDARs, etc., to form multi-level and multi-sensor fusion detection systems. The systems detect and identify various targets, accurately measure the distances of the targets, convert the coordinate system, and manipulate the mechanical arms and devices to act.
SOLUTION OVERVIEW
Vispect delivers tailored solutions by integrating advanced technologies such as AI detection, 3D sensors, LiDAR, Radar, RTK, IMU, mechanical arms, and cloud portals.
Our systems provide comprehensive safety and maintenance solutions for railways and infrastructure, as well as automation solutions through the development of heavy-duty robots for industrial and agricultural applications, reducing safety risks and enhancing efficiency.


Driver Status and Semaphore
Vispect supplies 40 sets of AI systems to TRT line-4. One system for one locomotive.
- Monitoring the train driver's fatigue status (distraction and yawning).
- Checking driver's semaphore before the train starts to move.
Abnormal conditions trigger alerts, visible and audible to remind the drivers, while reports with video footage are sent to the management center through subway intranet. This system has been certificated according to railway electronic OEM standards.

Above: Quality control of the System.





This system has been deployed on TRT line-6 on the line-sweep locomotive, installed on maintenance cart, for the purpose of route/track maintenance.
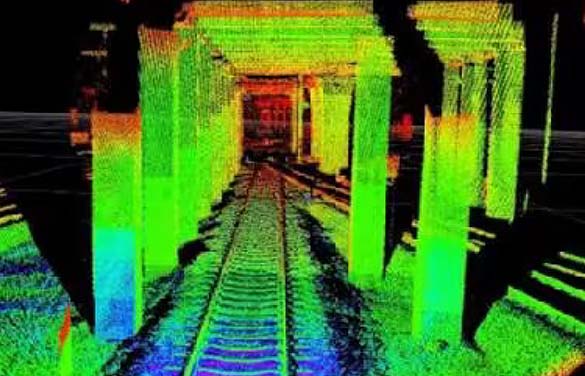
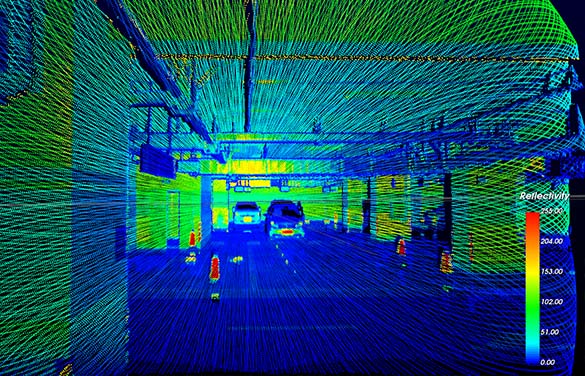
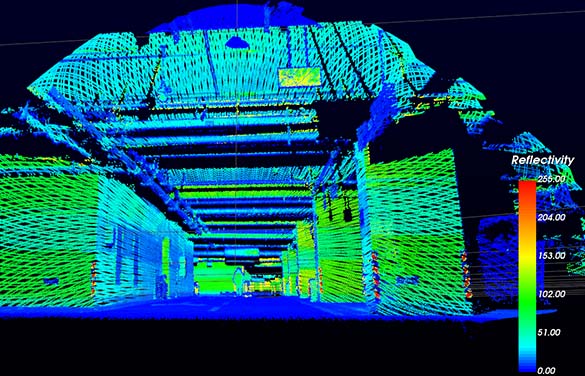
Automatic Obstacle Detection
The core function of the Driverless Train or Train Driving Assistance System is to detect obstacles that could pose a threat to the train's path. This includes detecting other trains on the same track and any trackside objects that may infringe on the train's clearance zone.

- Interface with ATP (Automatic Train Protection system) to brake (Optional)
- Electronic map from ATP to adjust to slopes and crosses (Optional)
- Multi-plane LiDARs
- Stand-alone system. Can work without trackside facility like radars
- Designed, tested, and certificated at SIL2 standards (Under certificating)

Solar Panel Installation Robot
Solar power is a key source of clean energy, and the number of solar plants worldwide is increasing. However, the construction and maintenance of these farms still heavily rely on human labor, which raises potential concerns.



Vispect has been working with the Zhejiang University Robotics Institute to jointly develop a new robot. This robot can accurately detect the position of each component of the mounting bracket, automatically grab the solar panel, and fit the solar panel on the bracket with a detection accuracy of ±1 or 3 mm. Behind this installer robot is an escort robot that carries solar panels and autonomously follows the installed robot.




In the first stage of this project, semi-automatic working mode is adopted: an installer drives the robot to the working place, and the robot automatically fits the panels onto the mounting brackets one by one around the working place. The project includes other functions such as GPS-RTK Positioning System, 4G Communication System, Management Platform, Task Release Interface, Path Planning, Manual Takeover Interface, etc. In the second stage of this project, 7X24 driverless installation can be applied.
PALM FRUIT PICKING ROBOT (UNDER DEVELOPMENT)
Palm fruit is used to extract palm oil. Palm fruit picking is currently carried out by hand. Because palm orchards are often located in remote areas, it is difficult to recruit enough people. Picking robots can greatly solve the problem of manpower shortage. First, the worker drives the robot to the palm trees, and the robot automatically identifies, locates, and cuts the palm leaves to expose the palm fruits. The robot then identifies and locates the fruit stalk, and cuts the palm fruit from the stalk to complete the work.

INFRASTRUCTURE
Vispect’s technology offers customized solutions to address various infrastructural management needs.

HEIGHT DETECTION
Height detection is essential for ambulances and fire trucks, which often navigate narrow lanes. These vehicles must detect overhead obstacles, such as power lines, to prevent collisions and ensure safe passage.
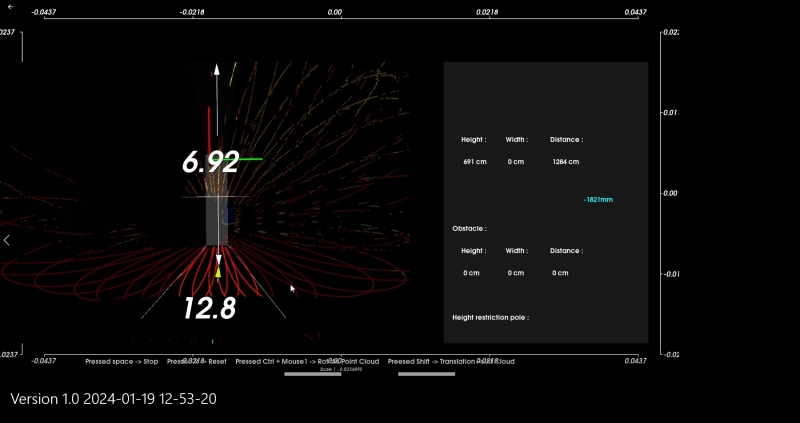
FOOTBRIDGES AND OVERPASSES
Footbridges and overpasses are at risk of being struck by high vehicles. These structures require a system to detect if approaching vehicles exceed their height limits.
We use LiDAR sensors installed on the underside of the footbridge (or on top of the vehicle) to detect height discrepancies and prevent collisions.
OTHER CUSTOMIZED SYSTEM
Vispect also provides highly customized systems upon request of our clients.

The Vispect prism camera features a 5MP CMOS sensor with dual image channels and two light entrances. Each entrance is equipped with a shutter made from liquid crystal, which can switch between transparent and opaque states with small electric currents. This allows the camera to control the flow of light to the sensor, ensuring only one entrance is open at a time. The shutters are synchronized by a controller, and when the shutter frequency reaches a certain threshold, both channels output clear, synchronized images.